STRAW MAN
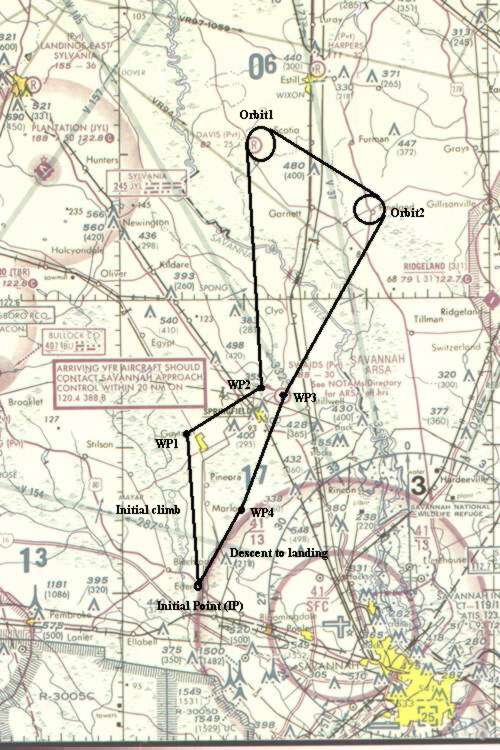
In a straw man mission, the VLR’s payload, consisting of cameras etc., is integrated with the aircraft at the base site and the ground station is set up. After preflight, the VLR mission profile is uploaded to the aircraft by the ground station. The initial mission profile may consist of a closed course described by sixteen waypoints in latitude, longitude, and altitude. Additional mission waypoints can be uploaded to the autopilot during flight. Take-off and landing are performed manually by the mission pilot at the point of origin. After take-off, climb to initial altitude, and system checkout, control of the aircraft is handed off to the on-board autopilot. The aircraft then begins to fly to the first waypoint. Out of visual range, data on position, velocity, fuel consumption, engine rpm, etc. are relayed to the ground station and displayed on the system monitor. A mission typically has several intermediate waypoints to fly a preset course and avoid restricted airspace. Upon arriving at the target area, the aircraft enters a loiter mode and flies a programmed path around and through the target area. The customer’s payload operates and collects data which are then stored or transmitted to the ground for real-time display. The aircraft then returns to the launch point or proceeds to another target. Upon arrival at the launch point, the mission pilot takes control and lands the aircraft.
If a problem arises in any critical on-board system, or upon ground command, the aircraft autonomously aborts the mission and returns to the launch point. If an emergency situation occurs in which return of the air vehicle to the launch point is perceived to be impossible, such as an engine failure, an on-board parachute system is deployed automatically and the aircraft floats slowly to earth. In such a circumstance, the vehicle is equipped with an emergency locator beacon to facilitate recovery.
|
|
|
|